Linux內(nèi)核兩個部分共同組成的一個操作系統(tǒng)。該系統(tǒng)中所有組件的源代碼都是自由的,可以有效保護學(xué)習(xí)成果,因而在嵌入式領(lǐng)域得到了廣泛的應(yīng)用。
FPGA是英文Field Programmable Gate Array的縮寫,即現(xiàn)場可編程門陣列,該器件是作為專用集成電路ASIC (Application Specific Integrated Circuit)領(lǐng)域中的一種半定制電路而出現(xiàn)的,它的出現(xiàn)既解決了定制電路的不足,又克服了原有可編程器件門電路數(shù)有限的缺點。在通信行業(yè)、傳輸網(wǎng)、醫(yī)療儀器、各種電子儀器、安防監(jiān)控、電力系統(tǒng)、汽車電子以及消費類電子中都大面積使用。隨著產(chǎn)品研發(fā)周期的逐步縮短,定制型產(chǎn)品的開發(fā)使FPGA在后面的應(yīng)用面越來越廣。例如在2G和3G通信,以及以后的4G通信和wimax等等通信類設(shè)備中,它與DSP、MPU一起將大量出現(xiàn)在其中。
S3C2410微處理器是一款由Samsung為手持設(shè)備設(shè)計的低功耗、高度集成的微處理器,采用272腳FBGA封裝,內(nèi)含一個ARM920T內(nèi)核和一些片內(nèi)外圍設(shè)備。在時鐘方面,該芯片集成了一個具有日歷功能的RTC和具有PLL (MPLL和UPLL)的芯片時鐘發(fā)生器。MPLL產(chǎn)生的主時鐘能夠使處理器工作頻率最高達到203MHz。這個工作頻率能夠使處理器輕松運行于Windows CE,Linux等操作系統(tǒng)并進行較為復(fù)雜的信息處理。為此,本文以S3C2410上使用Altera公司的EP2S30F67214為例,系統(tǒng)地介紹了在Linux系統(tǒng)環(huán)境下的FPGA的驅(qū)動方法。
1 基本原理
Linux下的設(shè)備驅(qū)動程序通常是一個存在于應(yīng)用程序和實際設(shè)備間的軟件層。許多設(shè)備驅(qū)動都是與用戶程序一起發(fā)行的,可以幫助配置和存取目標設(shè)備。
在Linux下驅(qū)動FPGA,其本質(zhì)上就是字符設(shè)備的驅(qū)動,慣例上它們位于/dev目錄。
1.1 主次編號
在內(nèi)核中,dev_t類型(在中定義)用來持有設(shè)備編號。通常2.6內(nèi)核版本限制在255個主編號和255個次編號。
建立一個字符驅(qū)動時,需要做的第一件事是獲取一個或多個設(shè)備編號。其必要的函數(shù)是regis-ter_chrdev_region,設(shè)計時可在中聲明:
int register_chrdev_region(dev_t first,unsigned int count,char*name);
如同大部分內(nèi)核函數(shù)一樣,如果分配成功,register_chrdev_region的返回值將是0。出錯時,則返回一個負的錯誤碼,但不能存取請求的區(qū)域。
1.2 重要數(shù)據(jù)結(jié)構(gòu)
注冊設(shè)備編號僅僅是驅(qū)動代碼必須進行的諸多任務(wù)中的第一個。驅(qū)動操作包括三個重要的內(nèi)核數(shù)據(jù)結(jié)構(gòu),稱為file_operations、file和inode。其中,對于FPGA驅(qū)動來說,最值得關(guān)注的是文件操作(file_operations)。
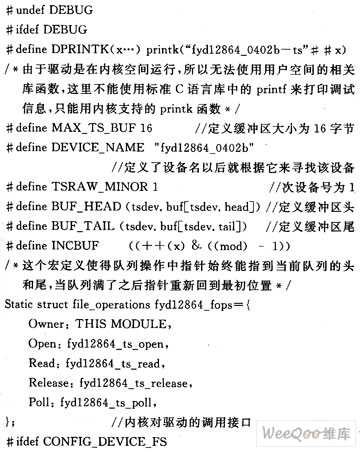
file_operation結(jié)構(gòu)是一個用字符驅(qū)動方式建立設(shè)備編號和設(shè)備操作的連接結(jié)構(gòu),定義在.是一個函數(shù)指針的集合。每個打開文件與它自身的函數(shù)集合相關(guān),這些操作大部分可由系統(tǒng)調(diào)用,例如:open(),read ()等等。典型的file_operation結(jié)構(gòu)可用FPGA設(shè)備列表所示,其代碼如下:

第一個file_operations元素根本不是一個操作,它是一個指向擁有這個結(jié)構(gòu)的模塊指針,或用來在操作使用時阻止模塊被卸載,它也是在中定義的宏;
llseek主要用于改變文件中的當前讀/寫位置,同時可將新位置作為(正的)返回值。其定義如下:
loff_t(*llseek) (struct file*,loff_t,int);
ioctl可為系統(tǒng)調(diào)用提供一個發(fā)出設(shè)備特定命令的方法。如果設(shè)備不提供ioctl方法,那么,對于任何未事先定義的請求,系統(tǒng)調(diào)用將返回一個錯誤。定義如下:
int(*ioctl) (struct inode*,struct file*,unsigned int,unsigned long):
1.3 設(shè)備注冊
內(nèi)核在內(nèi)部將使用struct cdev類型結(jié)構(gòu)來代表字符設(shè)備。在內(nèi)核調(diào)用設(shè)備操作前,代碼應(yīng)當包含。而如果想將cdev結(jié)構(gòu)嵌入設(shè)備特定的結(jié)構(gòu)中,則應(yīng)當初始化已經(jīng)分配的結(jié)構(gòu),其使用的代碼為:
void cdev_init(struct cdev*cdev,structfile_operations*fops);
1.4 open和release
open主要用于提供驅(qū)動初始化,在大部分驅(qū)動中,open應(yīng)當檢查設(shè)備特定的錯誤(例如設(shè)備沒準備好,或者類似的硬件錯誤),但是,其第一步常常是確定打開哪個設(shè)備。open的原代碼為:
int(*open) (struct inode*inode,structfile*flip);
1.5 讀/寫操作
讀和寫都是進行類似的任務(wù),就是從設(shè)備到應(yīng)用程序代碼的數(shù)據(jù)拷貝。因此,它們的原代碼比較相似:
ssize_t read(struct file*flip,char__user*buff,size_t count,loff_t*offp);
ssize_t write(struct file*filp,const char__user*buff,size_t count,loff_t*offp);
read的任務(wù)是從設(shè)備拷貝數(shù)據(jù)到用戶空間(使用copy_to_user),而write方法則是從用戶空間拷貝數(shù)據(jù)到設(shè)備(使用copy_from_user)。

圖1所示是用read參數(shù)表示一個典型讀的實現(xiàn)過程。
2 硬件電路
通常在大容量存儲項目中,S3C2410處理器一般作為主CPU,可對EP2S30F67214進行擴展,以使系統(tǒng)具有拍攝、存儲、下載、I/O口擴展的功能。由于FPGA的高速處理能力和易擴展性,ARM與FPGA的結(jié)合使用,將在嵌入式系統(tǒng)領(lǐng)域占據(jù)主導(dǎo)地位。
本項目中的ARM主要讀取FPGA的數(shù)據(jù),然后進行數(shù)據(jù)處理并送給上位機。其ARM處理器與FPGA的連接關(guān)系如圖2所示,其主要連接有32位寬數(shù)據(jù)線、27位寬地址線以及讀、寫、中斷和片選控制線等。

在S3C2410中,nGPCS4的物理地址為0x2000000—0x28000000,共計128MB的靜態(tài)物理空間。中斷方式為下降沿有效。
3 編程實現(xiàn)
3.1 設(shè)備驅(qū)動初始化
初始化模塊在內(nèi)核啟動時主要負責初始化FPGA工作。其實現(xiàn)由module_init () 和module_exit ()兩部分組成。其代碼如下:

3.2 異步中斷通知
在應(yīng)用程序中,可用如下代碼獲得中斷響應(yīng):
signal (SIGIO,test_handler);/*test_handler為函數(shù)名字*/
fcntl(fa,F(xiàn)_SETOWN,getpid ());
oflags=fcntl(fa,F(xiàn)_GETFL);/*fd為打開設(shè)備返回值*/
fcntl (fd,F(xiàn)_SETFL,oflags∣FASYNC);/*fd為打開設(shè)備返回值*/
應(yīng)當注意的是,不是所有的設(shè)備都支持異步通知。應(yīng)用程序常常假定異步能力只對socket和tty可用。
3.3 地址映射
在Linux設(shè)備驅(qū)動程序開發(fā)過程中,由于驅(qū)動程序操作的都是設(shè)備的虛擬地址,因此,要使驅(qū)動程序?qū)μ摂M地址的操作反映到正確的設(shè)備上,還需要通過內(nèi)存管理單元MMU來將設(shè)備的虛擬地址映射到正確的物理地址上去,從而保證驅(qū)動程序?qū)υO(shè)備的虛擬地址的操作,也就是要對其相應(yīng)的物理地址進行操作。使用內(nèi)存映射的好處是處理大文件時,其速度明顯快于標準文件I/O,這樣無論讀和寫,都少了一次用戶空間與內(nèi)核空間之間的復(fù)制。在用戶空間對FPGA設(shè)備的訪問可通過內(nèi)存映射來實現(xiàn)。FPGA可以看作是硬件連接在S3C2410微處理器的片選信號nGPCS4上的一段物理地址的尋址。因此,必須先把物理地址映射到虛擬地址空間,然后才能對該段地址進行讀/寫。通常用戶可用如下代碼關(guān)聯(lián)FPGA的地址:
fpga_base=ioremap(FPGA_PHY_START,F(xiàn)PGA_PHY_SIZE);
4 結(jié)束語
本文系統(tǒng)的介紹了ARM基于Linux平臺下的FPGA的驅(qū)動開發(fā)方法,并通過開發(fā)用戶程序,實現(xiàn)了數(shù)據(jù)的處理和傳輸,從而實現(xiàn)了FPGA在嵌入式領(lǐng)域的廣泛應(yīng)用。
]]>









.jpg)